NVIDIA의 Jetson Nano에 카메라를 연결하고 Real-time object detection을 수행한다. 얻어진 Bounding Box중 Person으로 분류된 Box의 좌표를 확인하고 해당 좌표가 중앙에 오도록 자동차의 모터를 이용해 조향각을 조절하고 앞으로 전진하여 사람을 따라가도록 한다.
Jetson Nano를 사용하기 위해서는 JetPack이라고 불리는 OS를 보드에 설치해야 한다. JetPack은 https://developer.nvidia.com/embedded/jetpack에서 다운로드 받을 수 있다. 각자의 보드에 맞는 JetPack을 다운로드 받아 Etcher, Rufus와 같은 툴을 이용하여 Jetson 보드의 SD카드에 플래시해 준다. 이후 처음 부팅시 뜨는 안내에 따라 초기설정을 진행하면 된다. 언어 설정은 영어로 하는것을 추천.
Ctrl+Alt+T를 눌러 터미널 창을 하나 띄우고 다음과 같이 입력한다.
sudo apt-get update
sudo apt-get install git cmake libpython3-dev python3-numpy
git clone --recursive https://github.com/dusty-nv/jetson-inference
cd jetson-inference
mkdir build
cd build
cmake ../
한줄씩 입력하여 작업이 완료되면 다음 줄을 입력한다 . 마지막줄을 입력하면 아래와 같은 창이 뜬다.
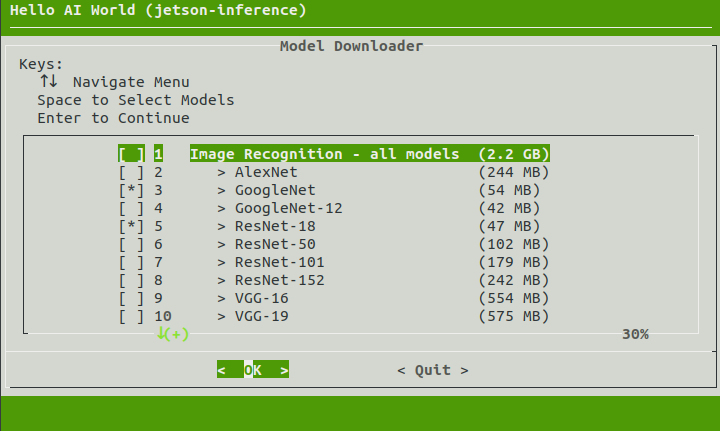
꼭 필요한 것은 Object Detection의 SSD-Mobilenet-v2이므로 이것만 체크하고 Ok를 눌러 진행해도 무방하다. 다른 Model을 사용해 보고 싶다면 사용할 것을 체크하여 진행하면 된다.
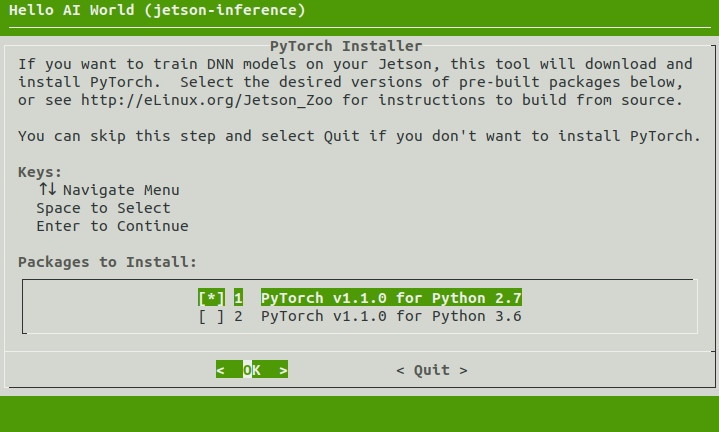
Model 다운로드가 완료된 후 아래와 같은 Pytorch 설치화면이 뜨는데 Pytorch 또한 꼭 필요한 것은 아니므로 개인적으로 필요한 사람만 선택하여 설치하면 된다.