Implementación de un robot cuadrúpedo con 12 servos
Estas instrucciones te permitirán obtener una copia del proyecto en funcionamiento en tu máquina local para propósitos de desarrollo y pruebas.
Se debe pullear el repositorio y abrir ArduinoIDE. Conectar el NodeMCU ... //TODO
Explica como ejecutar las pruebas automatizadas para este sistema. //TODO
Como primer paso se debera ejecutar el codigo de setup para que el robot se asigne su posicion inicial. Luego ... //TODO
-
VSCode - Editor de Codigo Principal
-
PlatformIO - Extension para programar en Microcontroladores
-
ArduinoIDE - IDE para complementar
-
ReactJS - Framework para Front-End en JavaScript
-
Octave - Para matrices de transformacion - Cinematica Inversa
-
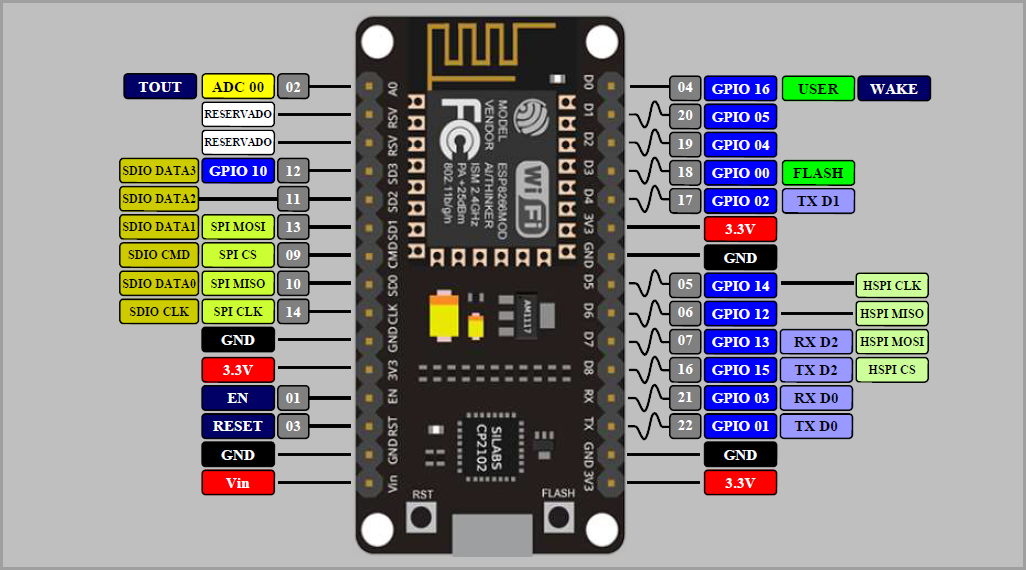
NodeMCU - Microcontrolador
-
ESP8266 Modulo ESP8266 WiFi (viene en el encapsulado)
-
PCA9685 - Controlador de Servos
-
SG90 - Servomotores
-
Fuente de Alimentacion - Debe ser capas de utilizar los 12 servos.
-
Partes Impresas 3D - Utilizadas para ensamblar el robot.
-
Sockets y Cableado - Evita soldar el microcontrolador. Mas dinamico.
{kind=link}
Para reportar un problema o sugerir cambios
Puedes encontrar mucho más de cómo utilizar este proyecto en nuestra Wiki
-
Adra Federico - Eligio el proyecto -
-
Alfonsin Jeronimo - Front-End React -
-
Reinoso Francisco - Que buen Readme -
También puedes mirar la lista de todos los contribuyentes quíenes han participado en este proyecto.
- Alan Castelli - Profesor Taller de Proyecto II -
Este proyecto está bajo la Licencia GPL-3.0 license
Mira el archivo LICENSE para detalles
Gracias @fedeadra25 por elegir el unico proyecto que involucra 12 servomotores