An assignment submission for Robotics and Intelligent Systems, a 4th year module at SLIIT.
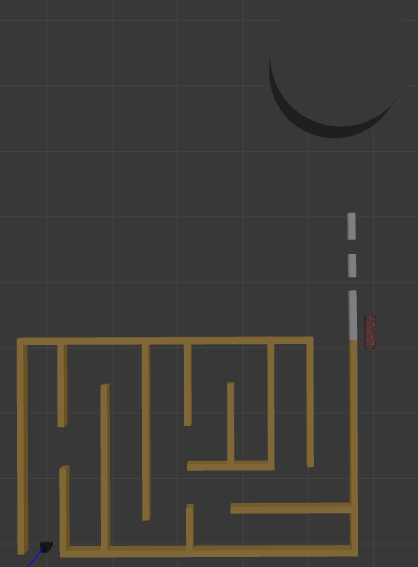
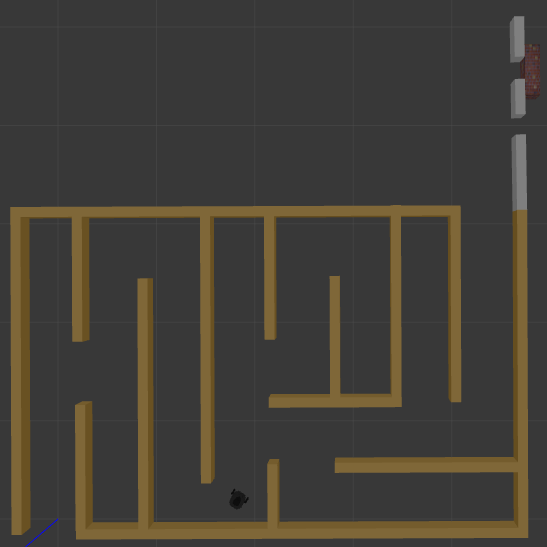
Robot should navigate through the maze autonomously and find the exit point.
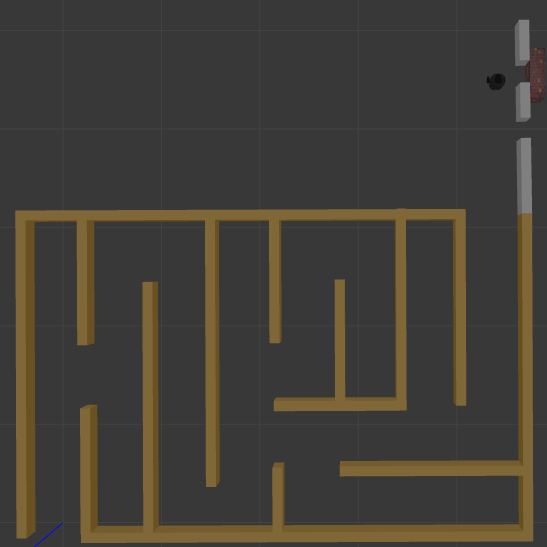
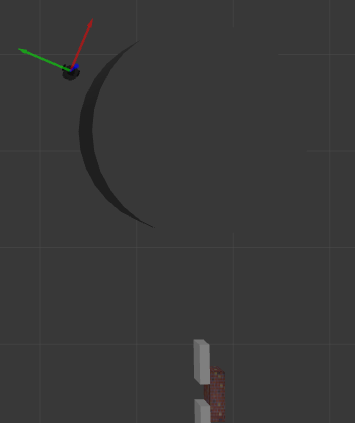
Upon exiting the maze the robot may find a straight wall to its right. The wall has two slits which could be opened or closed randomly. The robot must identify the number of open slits in the wall while navigating forward to reach the end of the wall.
A cylinder is placed at the end of the wall that the robot has to detect, it should then move towards it and rotate around the cylinder in a certain direction based on the number of open slits detected in task 2. Robot should rotate around cylinder clockwise if only one open slit was detected, or rotate in an anticlockwise direction if two slits were detected.