Home
Welcome to the mishanya-bot-project wiki!
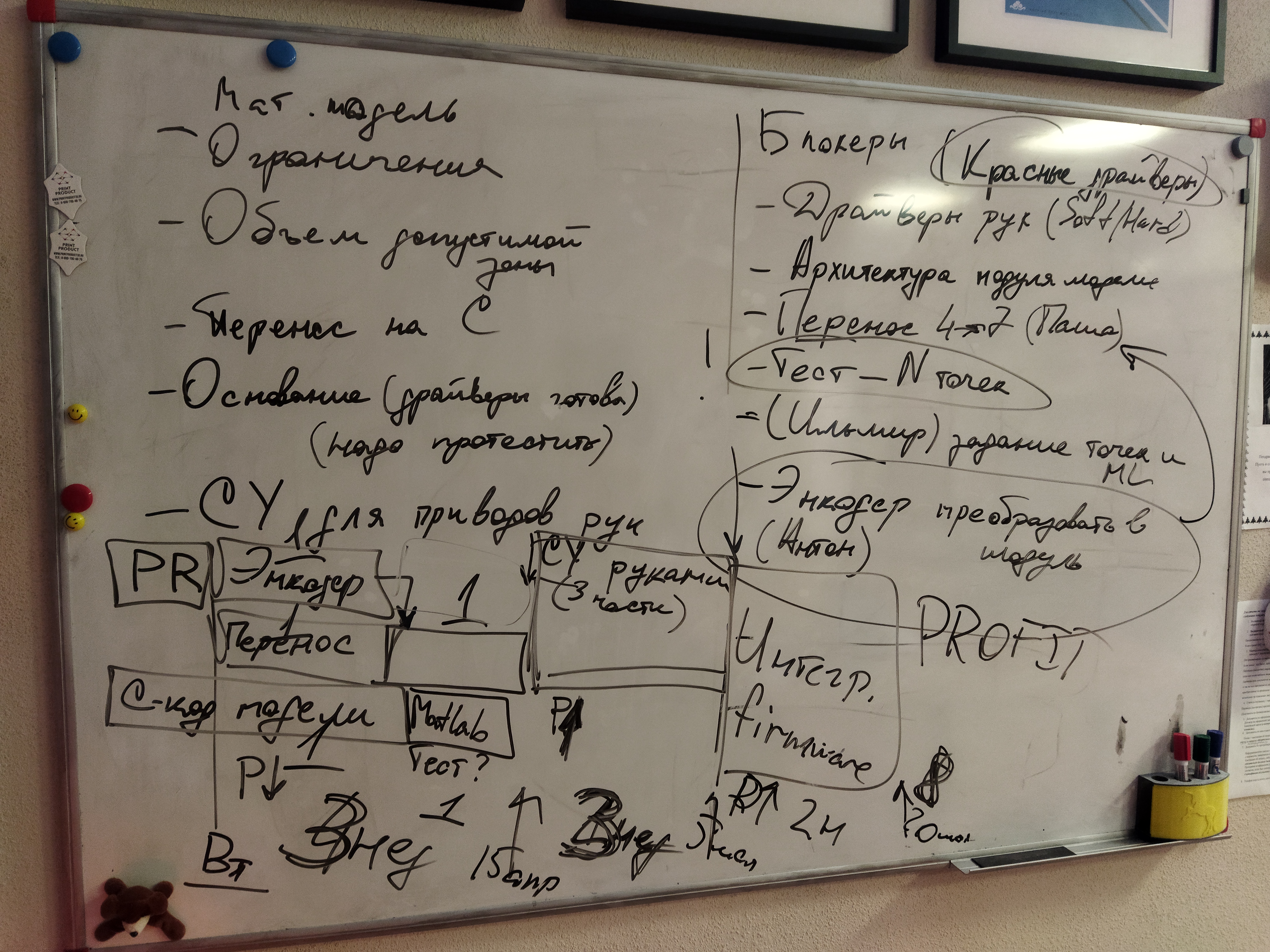
- Замерены ограничения движения приводов рук
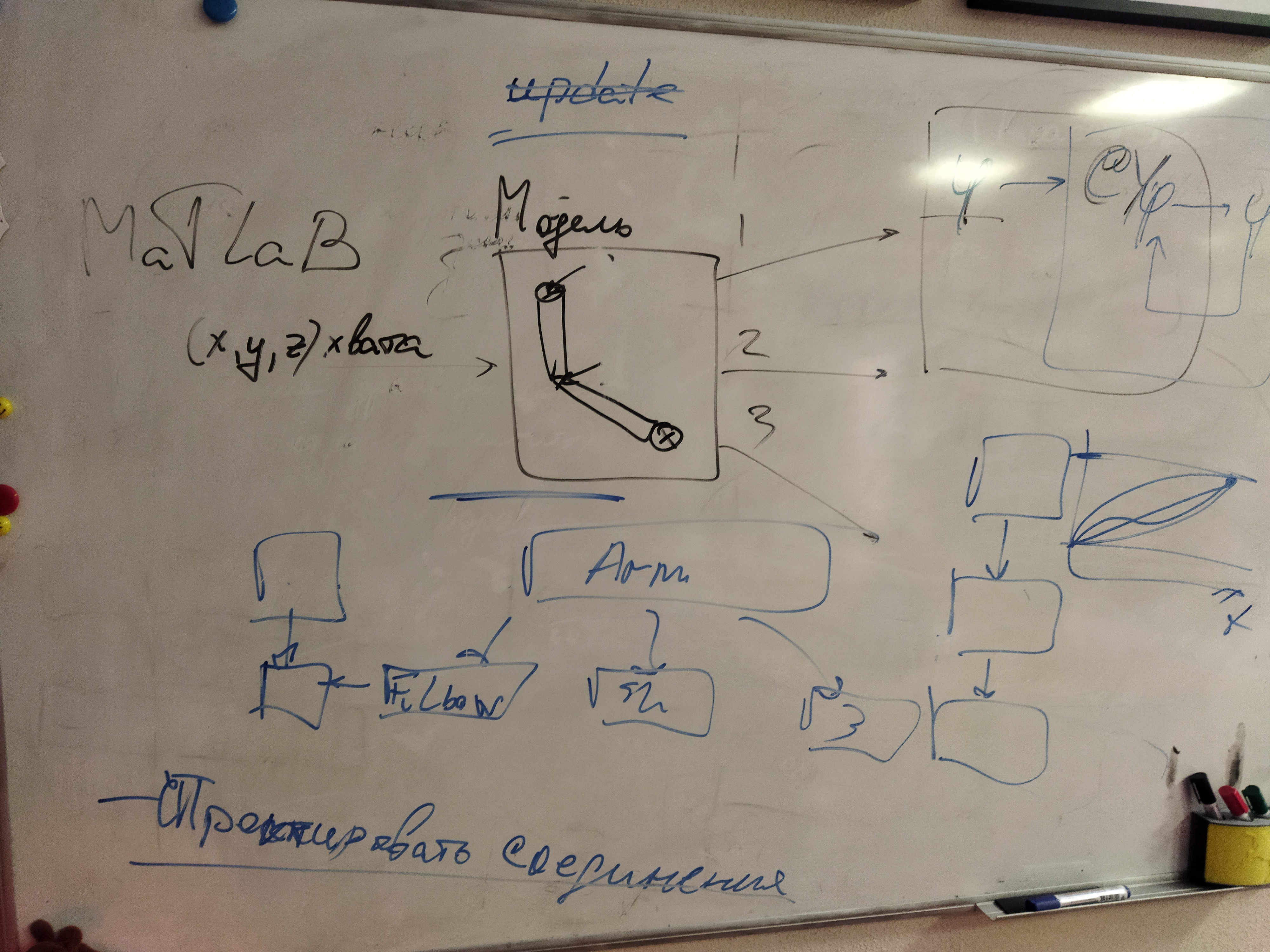
- Готова и проверена модель кинематики рук в MATLAB
- Подготовлен код для работы с драйверами на F7 для основания
- Подготовлен код для работы с драйверами на F4 для рук
- Подготовлен код для работы с абсолютными энкодерами на F4
- Подготовлен код работы с сервоприводами
- Оценка возможного объема движения руки
- Внесение ограничений в модель рук
- Реализация модели рук в С коде (вход - 3D точка, выход - три желаемых угла приводов)
Тут надо в задаче расписать, что считаем нулевым углом сервоприводов, направление положительного поворота и точку отсчета, чтобы при интеграции все свести
- Написание теста для МК на задание из MATLAB координат точки
- Завершение и закрытие PR Антона
- Организация модульности кода энкодера
- Перенос кода управления приводом на F7 (и проверка)
- Перенос кода модуля энкодера на F7 (и проверка)
- Реализация firmware задания углов трем приводам руки (вместе с Антоном)
- Проектирование подключения приводов к F7
- Напайка драйверов BB
- Поиск драйверов, соответствующих логике работы красных драйверов (под которые уже написана логика)
- 15 апреля - готов firmware для трех приводов (СУ) и написана модель для руки в С коде с тестом для задания из MATLAB
- 5 мая - рука работает по всем трем приводам (возможно задать три угла и система отрабатывает их)
- 20 мая - можем задать из MATLAB точку в пространстве и рука передвигается в эту точку