Assemble Your Robot
Some robots may come preassembled. For those that do not, follow the manufacturer's instructions for assembling your robot. When installing the actuators you should make every effort to ensure that they are positioned in such a way that the joint will be allowed the maximum range of motion. First make sure your servo is centered. There is a script in the utils folder that can help with that.
To set a servo to the middle of its range run, just use the center.js app found in the Tharp/utils directory. For example:
$ node center 11will center the servo attached to pin 11. Once your servo is centered you can align it for mounting.
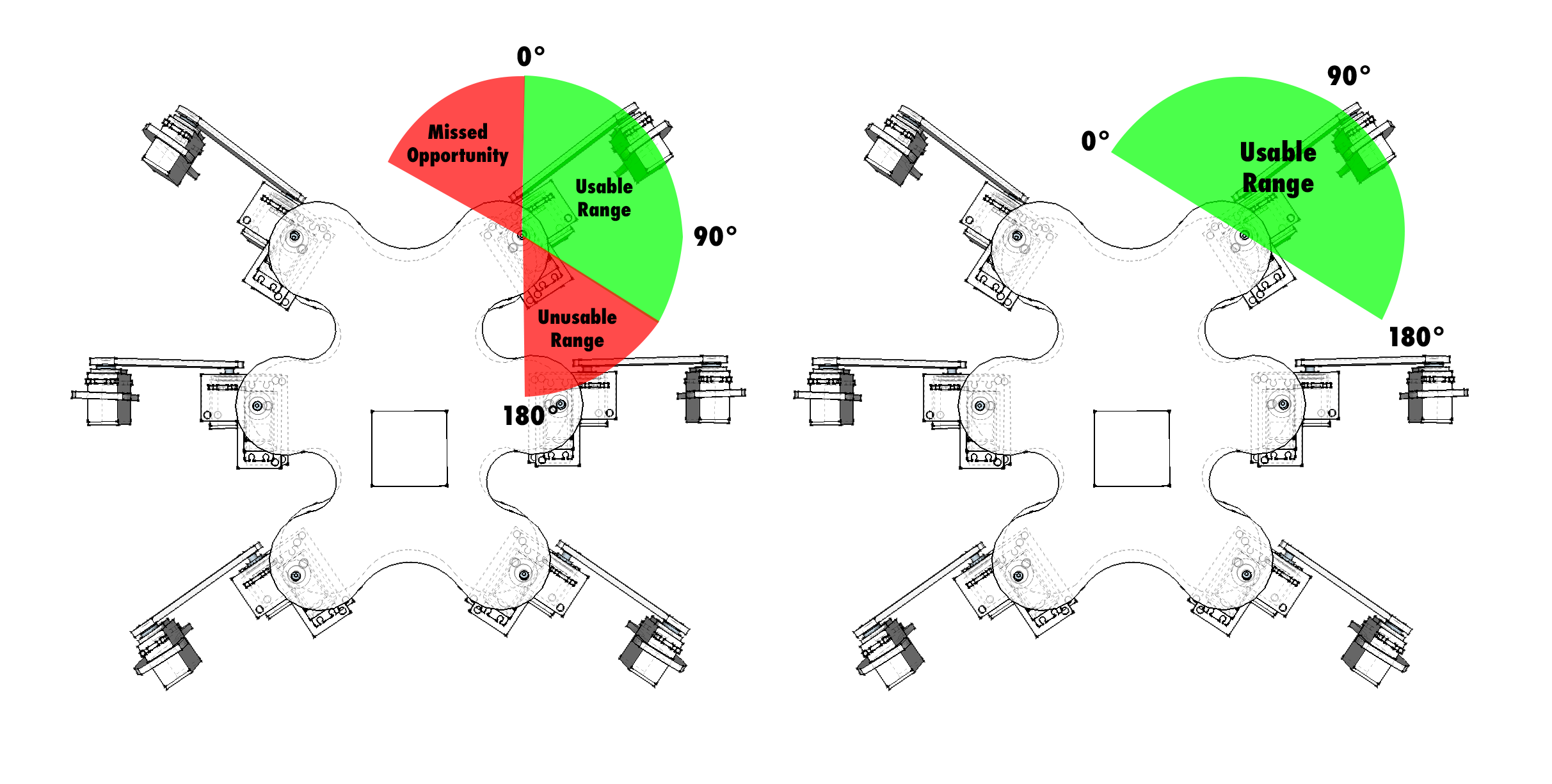
In the example on the left the servo has been installed with 90° (center on a 180° servo) at a right angle to the robot. This leaves some of the servo's range unusable and other areas unreachable. In the example on the right however the servo is centered in the ideal range which gives us more freedom of movement.
It is totally okay to disregard the fact that your servo, when set to 90 degrees, does not align properly with the global coordinate space. We'll address that later.
Previous: Get Oriented - Next: Configure Your Servos