Microscopically accurate volumetric digital photography without dedicated hardware.
This algorithm uses a stack of images taken at different focal lengths to infer the depth. Therefore, it can be used for any camera with optically-adjustable focus.
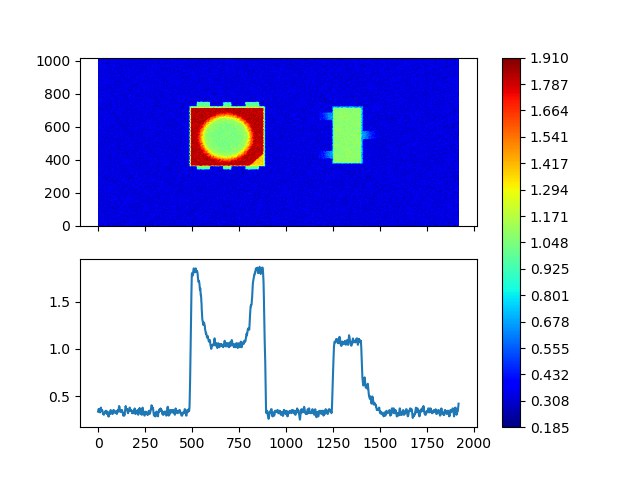
The generated depth map showing the accuracy of the algorithm
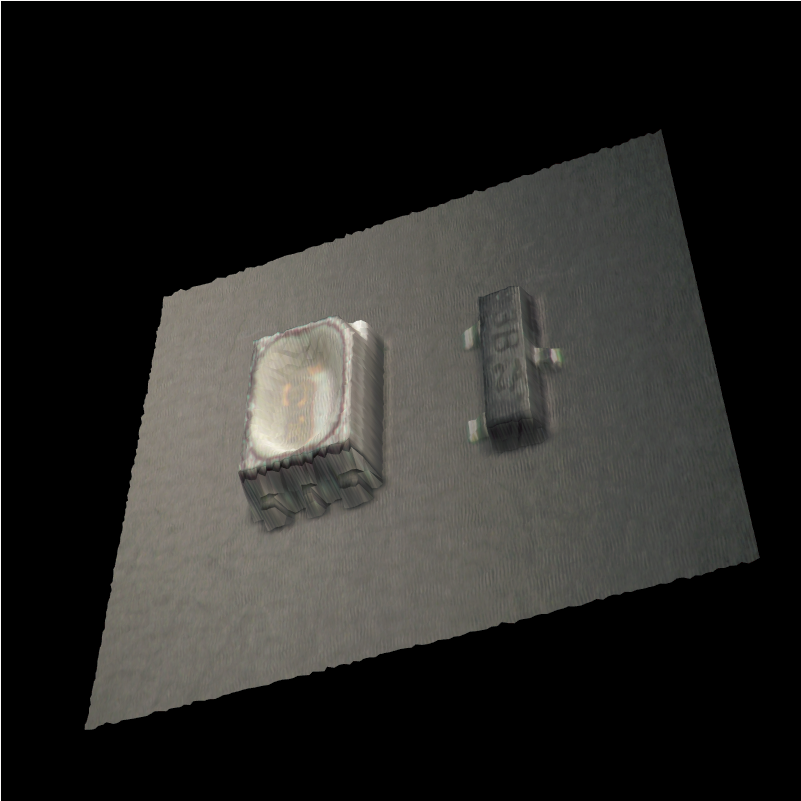
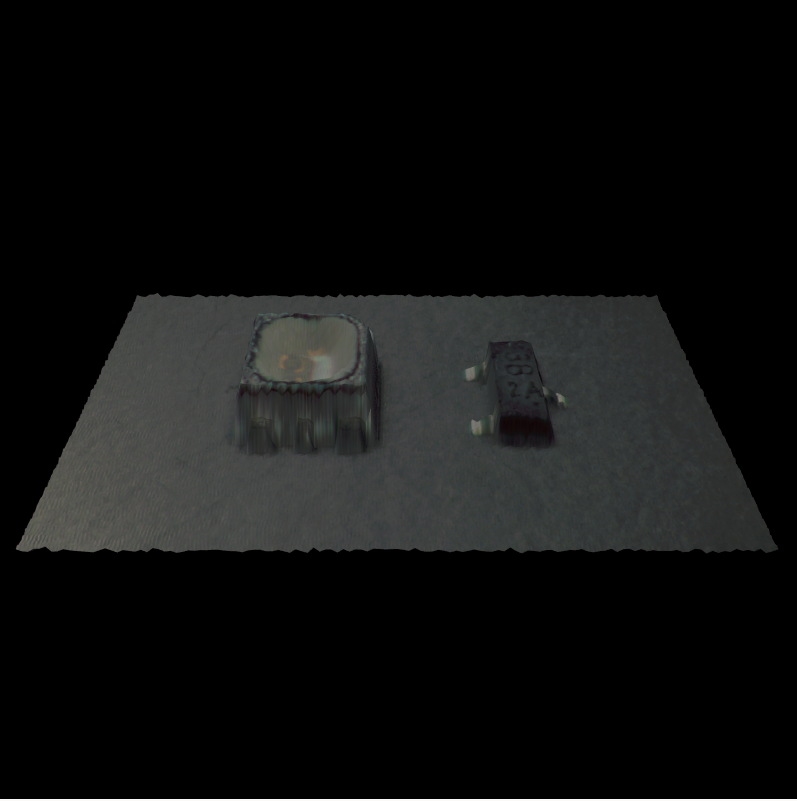
3D models of the 2 components
 |
 |
|
| ||
||
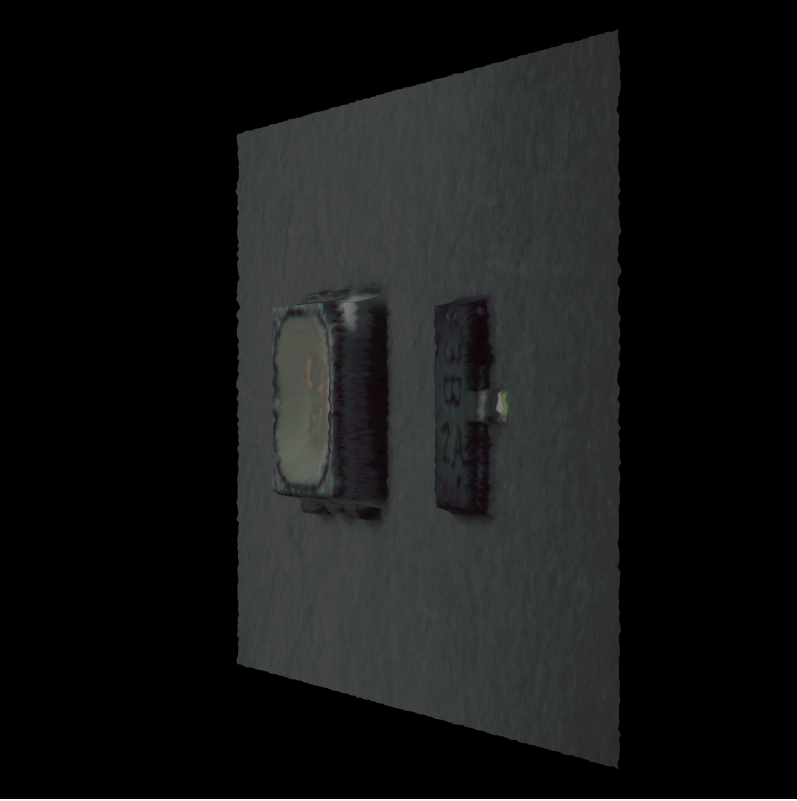
Image from the stack

The generated pointcloud