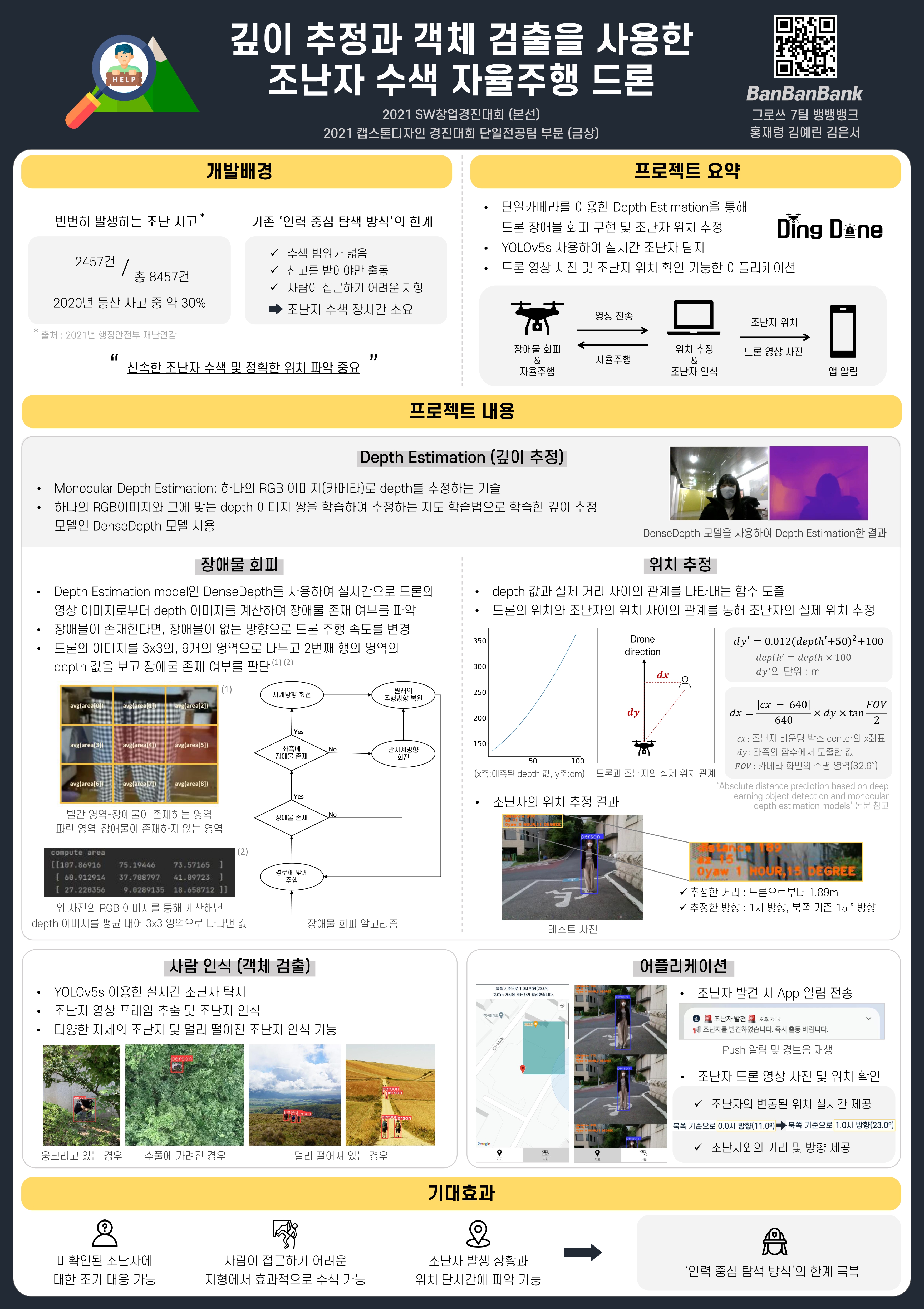
DingDone: Autonomous Flight Drone for Searching Survivor with Monocular Depth Estimation and Object Detection
Avoidance, Localization
- This code is tested with Keras 2.2.4, Tensorflow 1.13, CUDA 10.0, on a machine with an NVIDIA Titan V and 16GB+ RAM running on Windows 10 or Ubuntu 16.
- Other packages needed keras pillow matplotlib scikit-learn scikit-image opencv-python pydot and GraphViz for the model graph visualization and PyGLM PySide2 pyopengl for the GUI demo.
- Minimum hardware tested on for inference NVIDIA GeForce 940MX (laptop) / NVIDIA GeForce GTX 950 (desktop).
- Training takes about 24 hours on a single NVIDIA TITAN RTX with batch size 8.
- avoiding obstacle with monocular depth estimation
- detecting survivor with object detecting
- estimating distance and direction of survivor from drone
- Clone this repository
$ git clone https://github.com/Ewha-BanBanBank/DingDone_final.git
- Connect drone to your computer
- Run Demo - avoiding obstacle
$ cd Avoidance
$ python3 DingDone_path.py
- Run Demo - detecting survivor, estimating position of survivor and showing those information to application
$ cd ../Localization
$ python3 localization.py
- Monocular Depth Estimation : https://github.com/ialhashim/DenseDepth
- Object Detection : https://github.com/ultralytics/yolov5