
- src : Spark的源代码,包括底层配置,硬件驱动,和各个应用功能包等。
- doc : 软硬件依赖包。
- System: Ubuntu 16.04+
- ROS Version: kinetic (Desktop-Full Install)
- 下载工作空间 Download the workspace:
git clone https://github.com/NXROBO/spark.git- 安装依赖库 Install libraries and dependencies:
cd spark
./onekey.sh- 根据提示选择103 Choose NO.103
103catkin_make- 如果编译一切正常,可根据提示运行相关例程。If everything goes fine, test the examples as follow:
./onekey.shLaunch file arguments description
深度摄像头的型号,其对应值如下表。The model type of the depth camera, and the corresponding values can be seen below...
| Camera version | CAMERATYPE value |
|---|---|
| Astra Pro | "astrapro" |
| Astra | "astra" |
| Intel RealSense D435 | "d435" |
深度摄像头的深度信息topic,其对应值如下表。The depth information topic of the depth camera, and the corresponding values can be seen below...
| Camera version | depthtolaser value |
|---|---|
| Astra Pro | "/camera/depth/image_rect_raw" |
| Astra | "/camera/depth/image_raw" |
| Intel RealSense D435 | "/camera/depth/image_rect_raw" |
激光雷达的型号,其对应值如下表。The model type of the lidar, and the corresponding values can be seen below...
| Lidar version | LIDARTYPE value |
|---|---|
| YDLIDAR G2 | "ydlidar_g2" |
| 3iRobotics lidar | "3iroboticslidar2" |
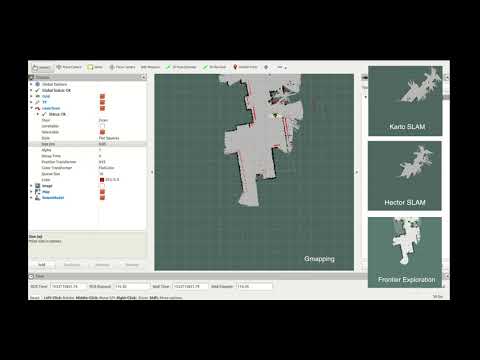
SLAM的算法,其对应值如下表。The algorithm of the SLAM, and the corresponding values can be seen below...
| SLAM algorithm | SLAMTYPE value |
|---|---|
| gmapping | "gmapping" |
| hectorSLAM | "hector" |
| Frontier-based exploration | "frontier_exploration" |
| kartoSLAM | “karto” |
1.Spark跟随 Spark-Follower

cd spark
source devel/setup.bash
roslaunch spark_follower bringup.launch camera_type_tel:=CAMERATYPE2.Spark建图 Spark-SLAM-Mapping
cd spark
source devel/setup.bash
roslaunch spark_slam 2d_slam_teleop.launch slam_methods_tel:=SLAMTYPE camera_type_tel:=CAMERATYPE lidar_type_tel:=LIDARTYPE3.Spark导航 Spark-Navigation
cd spark
source devel/setup.bash
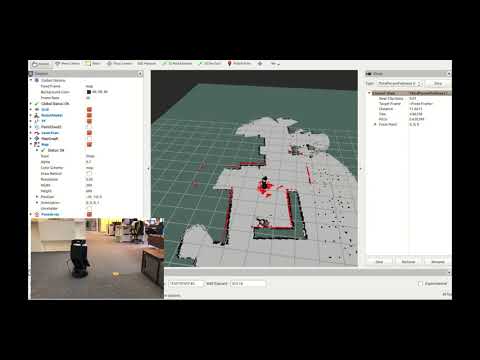
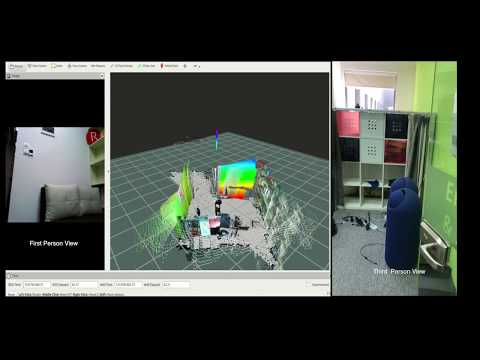
roslaunch spark_navigation amcl_demo_lidar_rviz.launch camera_type_tel:=CAMERATYPE lidar_type_tel:=LIDARTYPE4.Spark-RtabMap建图 Spark-RtabMap-Mapping
cd spark
source devel/setup.bash
roslaunch spark_slam depth_slam_teleop.launch slam_methods_tel:=SLAMTYPE camera_type_tel:=CAMERATYPE depthtolaser:=depthtolaser5.Spark机械臂视觉抓取 Spark-Carry_Object

cd spark
source devel/setup.bash
roslaunch spark_carry_object spark_carry_object_only_cv3.launch camera_type_tel:=CAMERATYPE lidar_type_tel:=LIDARTYPE