EDGE-A (Expanded Model, General):
- Dual CPU/MCU System
- EDGE-A uses a single ESP32-S3 and a single RP2350 dual-core ARM Cortex-M0+, with the S3 handling high-level coordination, wireless communication (WiFi/Bluetooth), audio processing, data logging, user interface, and system management, while the RP2350 serves as the dedicated real-time processing unit for precise motor control, quadrature encoder processing, sensor fusion (gyroscope + TOF), PWM generation, and all timing-critical operations.
- The two will communicate over dedicated high speed UART
- ESP32-S3 based (ESP32-S3-WROOM-1)
- N16R8
- 2.4 GHz Wifi (802.11 b/g/n)
- Bluetooth 5.0 (LE)
- USB-C (USB4085-GF-A)
- Interrupt-capable GPIO pins for encoders/switches
- Analog comparators for limit switches
- Hardware quadrature encoder inputs (4 channels)
- Low-power sleep modes
- Light Sleep Mode
- CPU is paused, RTC and ULP co-processor are running.
- Peripherals (like WiFi, BT) can stay connected.
- Wakeup sources: Timer, GPIO, ULP, etc.
- Lower power consumption than active mode.
- Deep Sleep Mode
- CPU, most RAM, and peripherals are powered down.
- Only RTC memory and ULP remain active.
- Very low power (tens of µA).
- Wakeup sources: RTC Timer, GPIO, ULP.
- Light Sleep Mode
- RP2354B
- External 128MB flash memory (W25Q128JVS)
- External Crystal (ABM8-272-T3)
- I/O OUT - Check GPIO Diagram
- 10 PIO pins (5 pairs) - maximizes the RP2354B strength
- 2 ADC pins - essential for motor feedback
- I/O can be male/female dupont
- Distance TOF Sensor (VL53L0CXV0DH1)
- Gyroscope (ICM-20948)
- Motion Interrupted Logging (MIL): only log while moving
- USB-C/Battery Power
- Battery monitoring/protection circuit
- On-board voltage regulation (3.3V, 5V, GND rails)
- 3 PWM control channels
- 2 integrated DC motor drivers (DRV8833)
- 3 Servo Connections (GND, 5V, I/O)
- MicroSD Card Slot (TF-115)
- 3x RGB LED (WS2812B)
- Onboard Microphone (ICS-43434)
- Internal USB hub IC (CH334R)
- Single USB-C connector routes to the hub
- Hub connects to both ESP32-S3 and RP2354B USB lines
- Each processor appears as separate COM ports on computer
LoRa/LoRaWAN Communication (Wio-SX1262)- Battery Charger Circuit (MP2607DL-LF-Z)
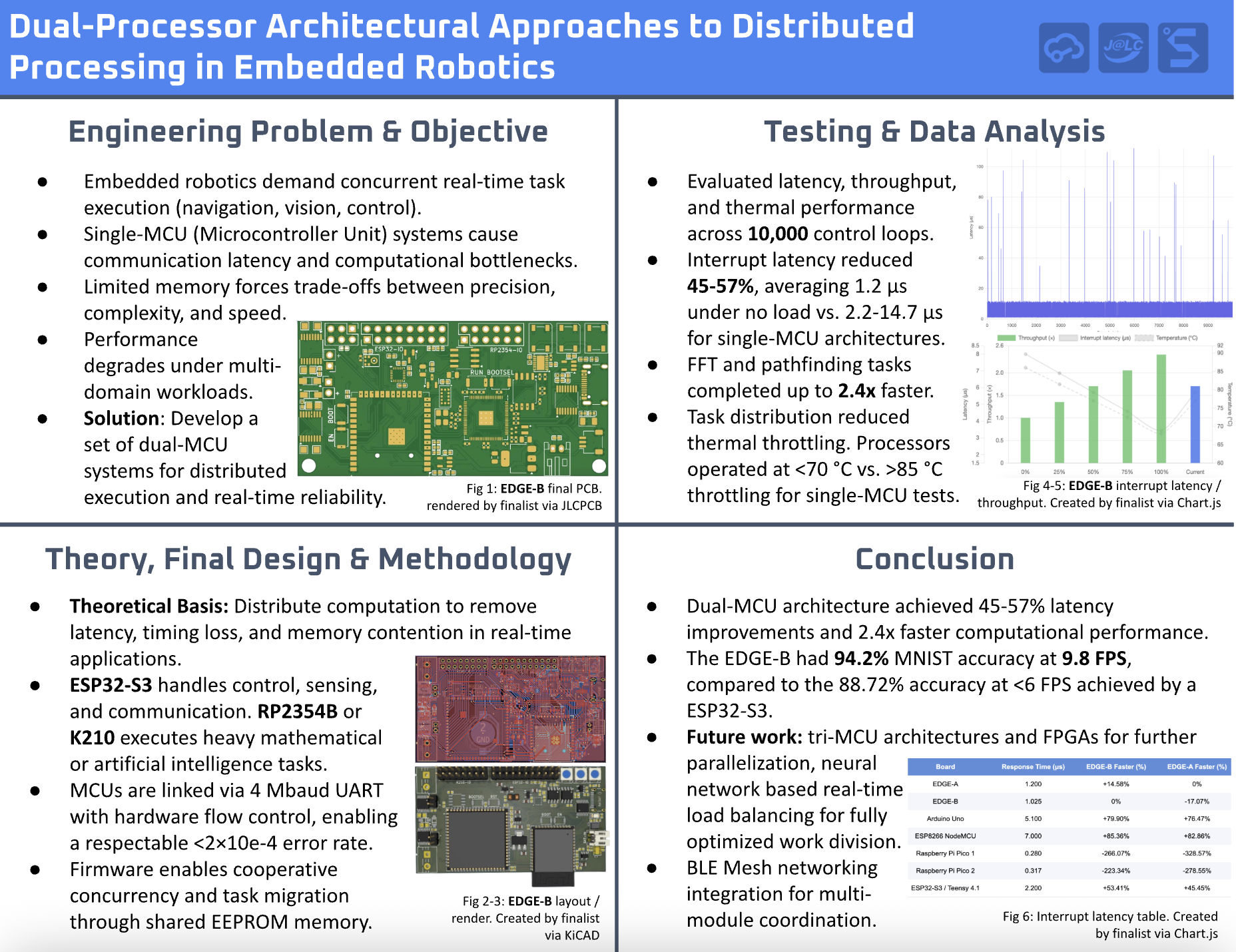
EDGE-B (Expanded Model, Machine Learning):
- Dual CPU/MCU System
- EDGE-B uses a single ESP32-S3 and a single Kendryte K210 (Sipeed M1), the S3 for high-level planning, sensor fusion (gyro + TOF), wireless communication, audio processing, data logging, user interface, and the K210 for AI and ML applications.
- The two will communicate over dedicated high speed UART and distribute tasks/share larger pieces of information via shared EEPROM.
- Ideally, a MAIX M1 chip would be used instead of a bare K210, but if needed, a bare K210 will do.
- ESP32-S3 (ESP32-S3-WROOM-1)
- N16R8
- 2.4 GHz Wifi (802.11 b/g/n)
- Bluetooth 5.0 (LE)
- USB-C (USB4085-GF-A)
- Interrupt-capable GPIO pins for encoders/switches
- Analog comparators for limit switches
- Hardware quadrature encoder inputs (PCNT)
- Low-power sleep modes
- Light Sleep Mode
- CPU is paused, RTC and ULP co-processor are running.
- Peripherals (like WiFi, BT) can stay connected.
- Wakeup sources: Timer, GPIO, ULP, etc.
- Lower power consumption than active mode.
- Deep Sleep Mode
- CPU, most RAM, and peripherals are powered down.
- Only RTC memory and ULP remain active.
- Very low power (tens of µA).
- Wakeup sources: RTC Timer, GPIO, ULP.
- Light Sleep Mode
- K210 based (Sipeed MAiX module or bare chip)
- I/O OUT - Check GPIO Diagram
- Camera Input for OV2640 (FPC footprint cable)
- Connected to the K210
- Gyroscope (ICM-20948)
- Motion Interrupted Logging (MIL): only log while moving
- USB-C/Battery Power
- Battery monitoring/protection circuit
- On-board voltage regulation (3.3V, 5V, GND rails)
- 2 PWM control channels
- 2 integrated DC motor drivers (DRV8833)
- MicroSD Card Slot (TF-115)
- 3x RGB LED (WS2812B)
- Onboard Microphone (ICS-43434)
- EEPROM shared 128MB storage (CAT24M01W)
- Ribbon Cable Input (OV2640)
- Internal USB hub IC (CH334R)
- Single USB-C connector routes to the hub
- Hub connects to both ESP32-S3 and K210 USB lines
- Each processor appears as separate COM ports on computer
- K210 - USB-to-UART bridge (CH340N)
- K210 will also need a dedicated 16MB of flash storage
- Battery Charger Circuit (MP2607DL-LF-Z)