This project demonstrates motion planning of a robotic arm using MoveIt! in ROS.
- Gazebo simulation integrated with MoveIt!.
- Joint space motion planning.
- Cartesian space motion planning.
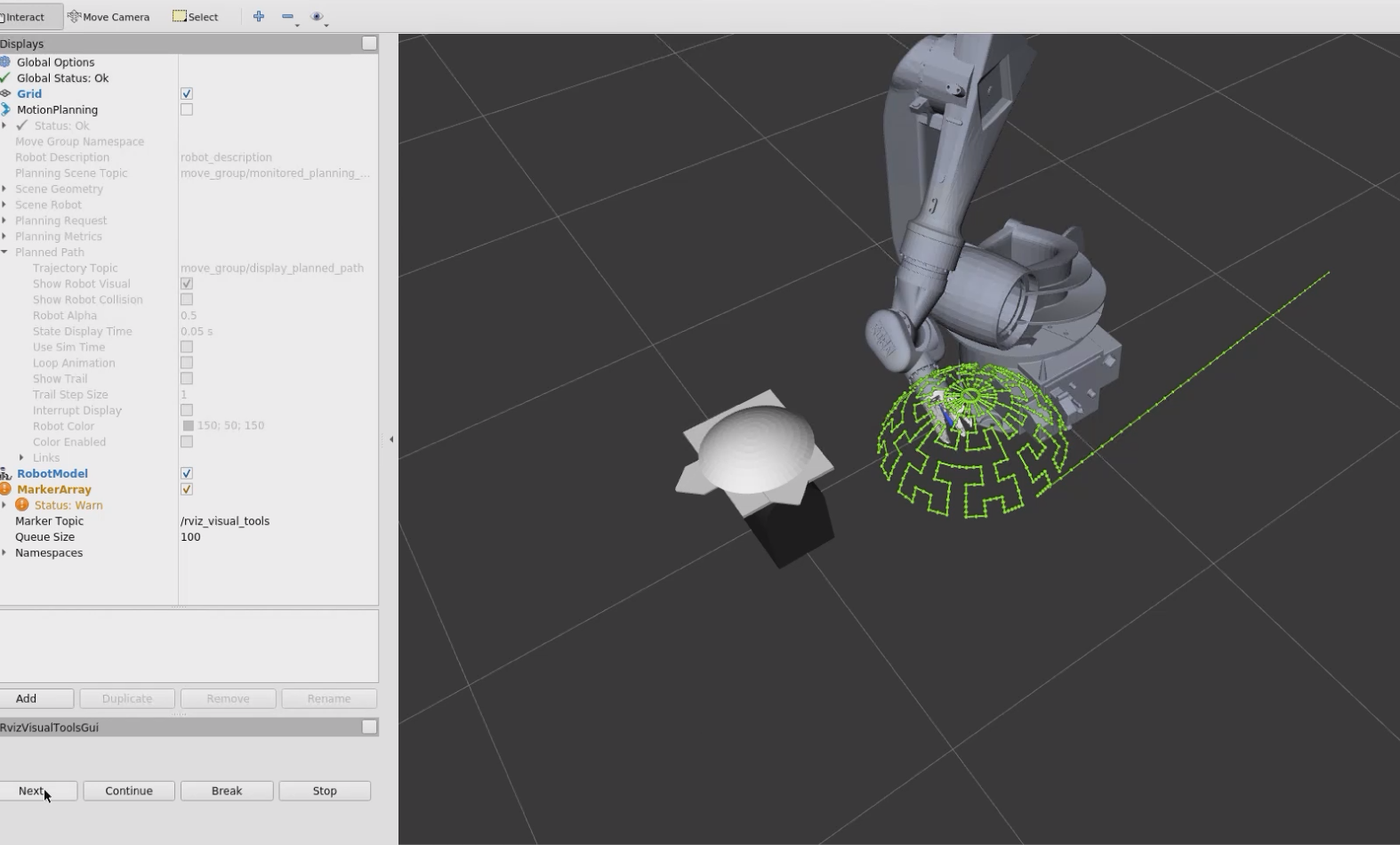
- Spherical planning algorithm.
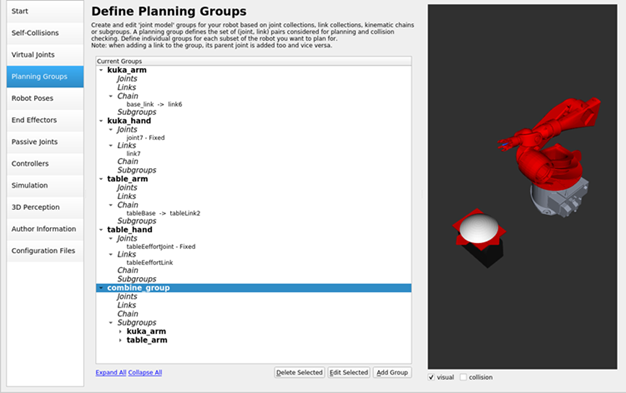
- Joint planning with a dual-axis turntable.
- Replaced the default solver with trac_ik for more efficient IK solving.
https://bitbucket.org/traclabs/trac_ik/src/master/
- Configure a virtual joint group in Setup Assistant to plan both the arm and turntable together.
- Launch Rviz:
roslaunch kuka_moveit_config demo.launch- Start the control node:
rosrun arm_control move_group_interface- After each task finishes, click NEXT in the RvizVisualGUI window to run the next task.