A simple quadcopter built on the STM32F411CEU6 (black pill board) with 4 motors, a PPM receiver, ADC checking battery level and I2C communication with MPU6050 imu.
The video below shows the initial flights with a proportional and integral control loop the Pitch and Roll axis but not on Yaw.
Drone.mp4
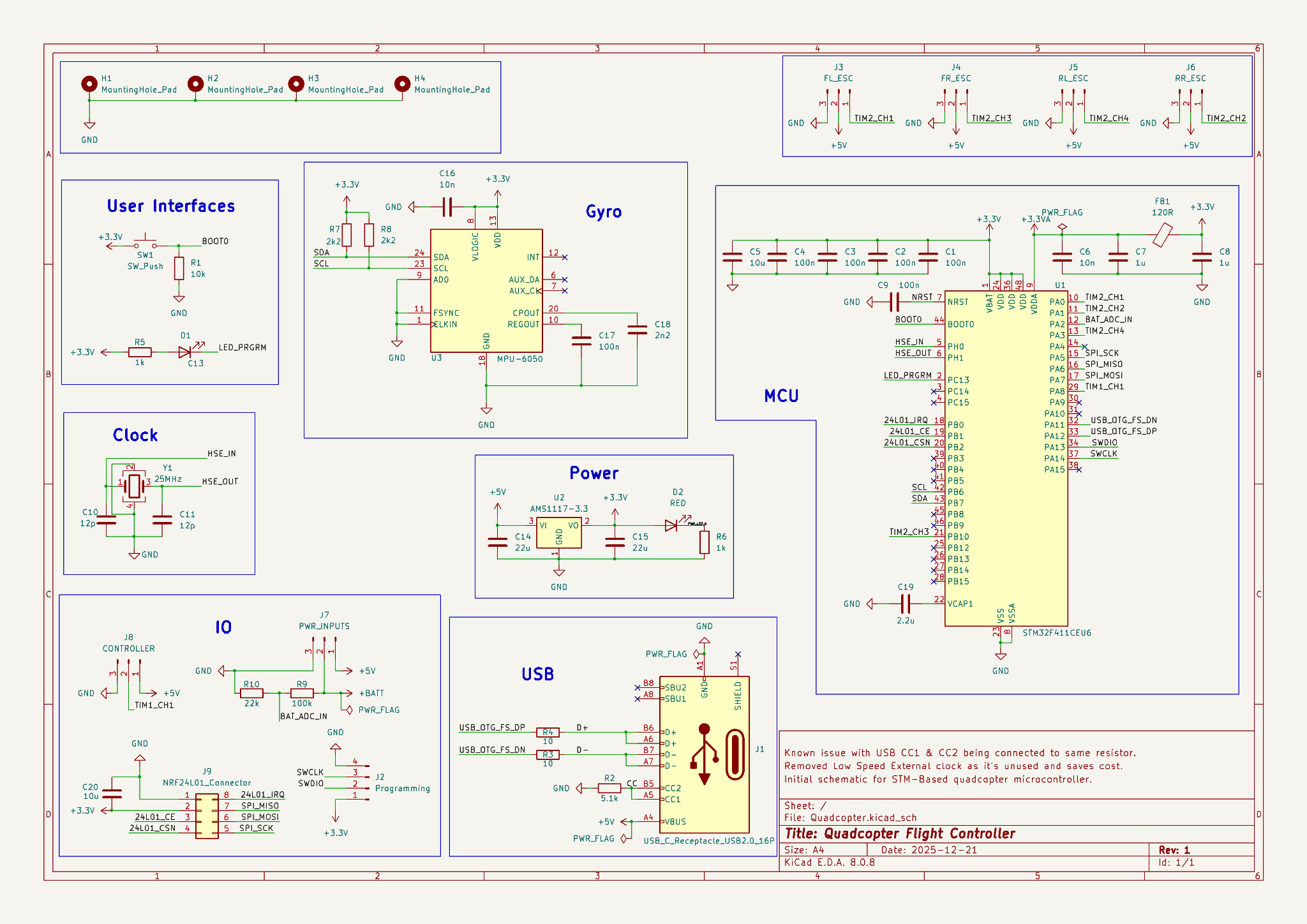
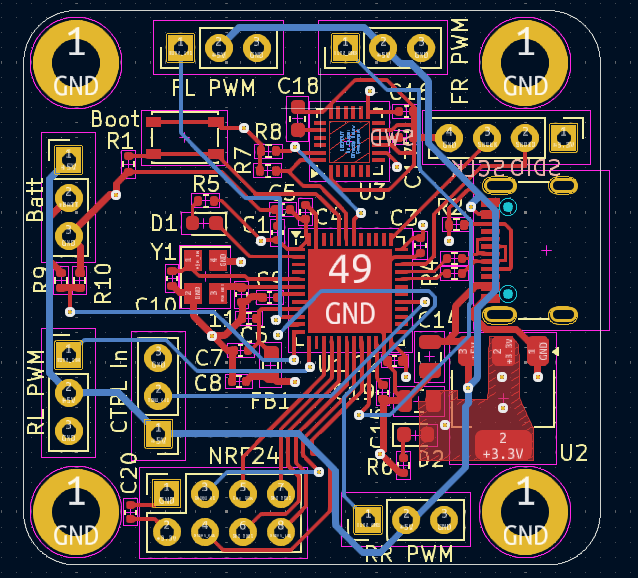
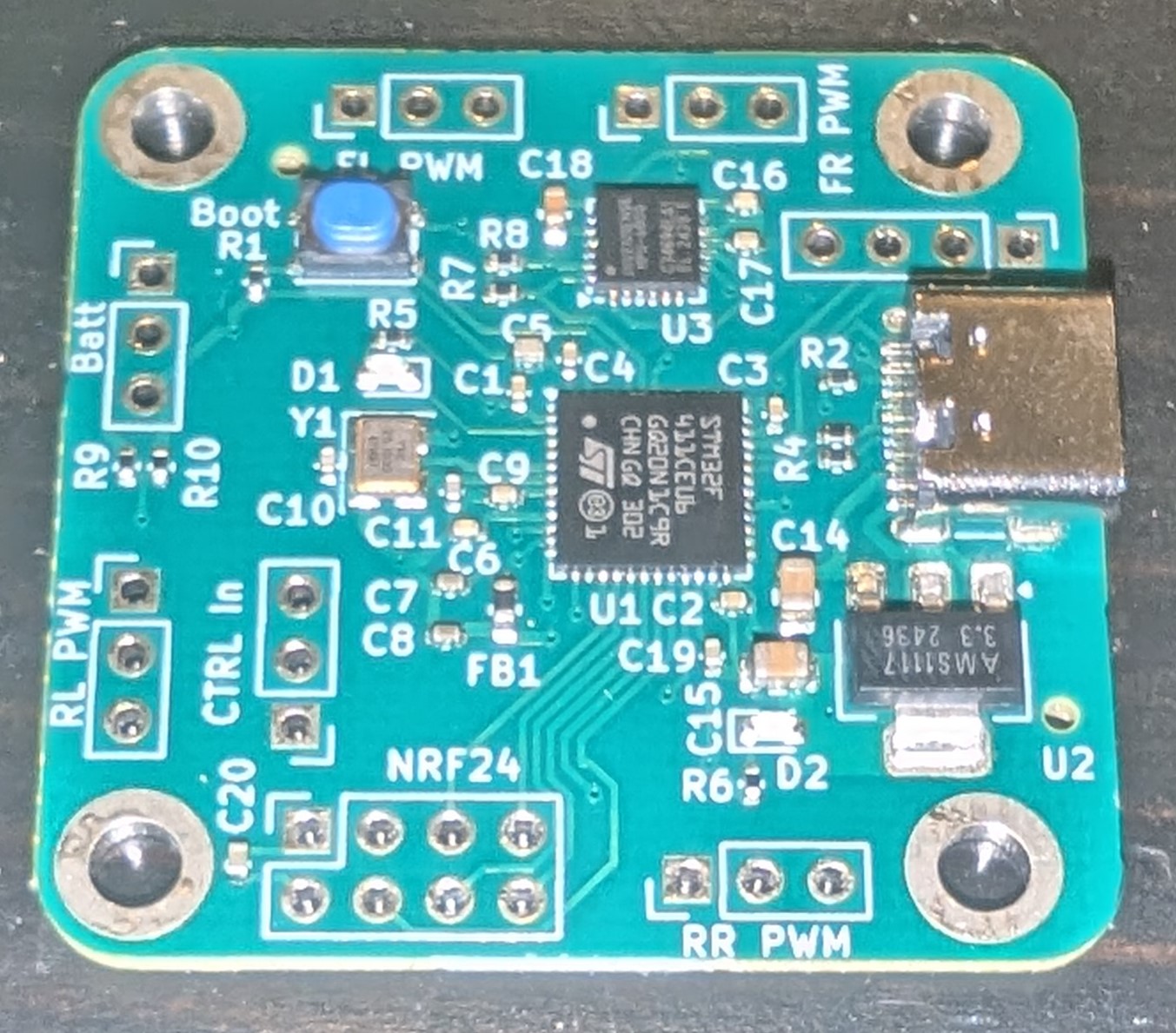
Below is the schematic, high level routing and manufactured PCB created after prototyping the functionality.
Below are images of the prototype perfboard wired up with the I2C (SDA=Yellow, SCL=White), PWM motor outputs (Green), PPM RC receiver input (Blue) and the battery ADC voltage divider across the resistors.




Final drone hardware with battery installed.


Created mount for MPU to reduce vibration impacting position accuracy.



