Implement an Obstacle Avoidance Node for Olaf #1
Description
This scenario is hypothetical
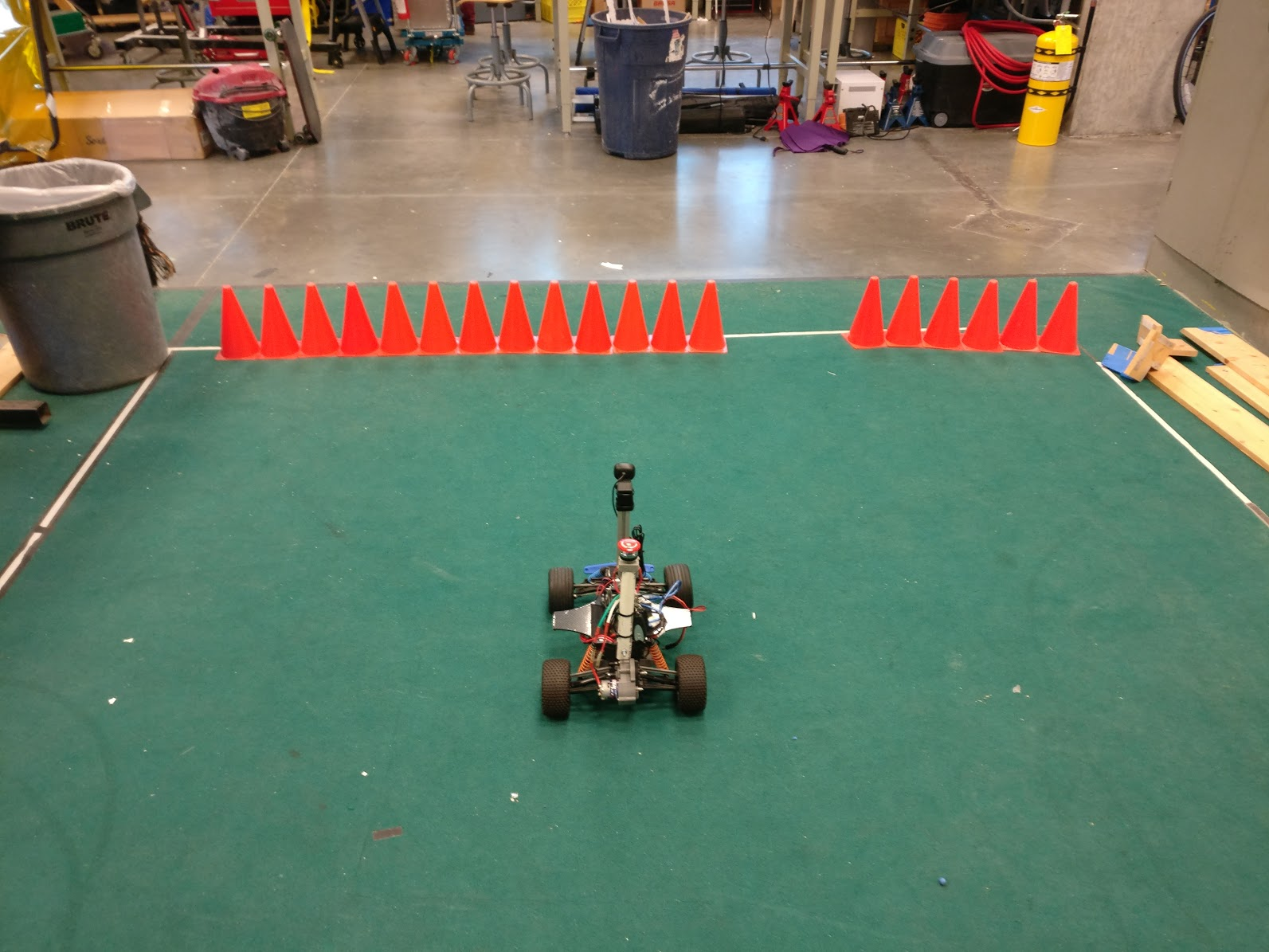
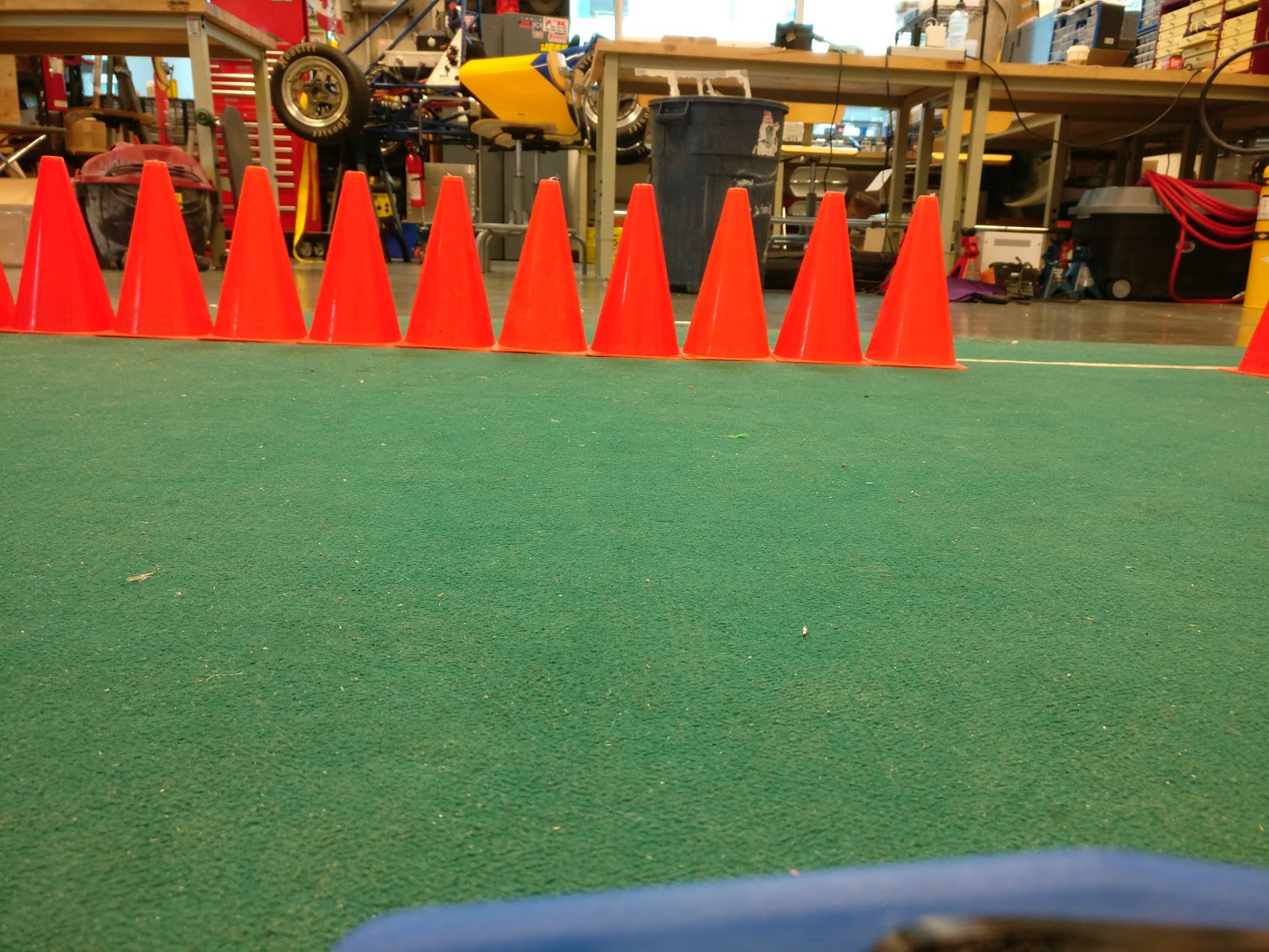
IARRC has come out with a new sub-competition called hole-in-a-wall! In it, we will start at a distance from 3-10 feet back from a wall of cones with a hole just big enough for our robot in it (see picture below), and are required to navigate through the hole without hitting the wall. The hole is only slightly larger then Olaf. We'd like to develop a node that can navigate through the hole in the wall, based on data from our LIDAR. This node will take in a ROS LaserScan message, and output a ROS Twist message (which will dictate the movement of the robot).