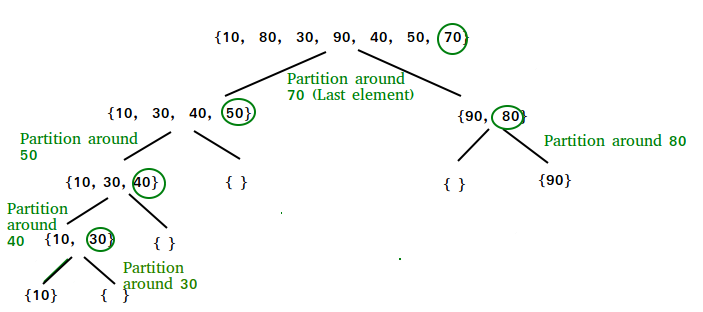
Worst case: O(n^2) Like Merge Sort, QuickSort is a Divide and Conquer algorithm. It picks an element as pivot and partitions the given array around the picked pivot. There are many different versions of quickSort that pick pivot in different ways.
- Always pick first element as pivot.
- Always pick last element as pivot (implemented below)
- Pick a random element as pivot.
- Pick median as pivot.
Ex:
// Java program for implementation of QuickSort
class QuickSort
{
/* This function takes last element as pivot,
places the pivot element at its correct
position in sorted array, and places all
smaller (smaller than pivot) to left of
pivot and all greater elements to right
of pivot */
int partition(int arr[], int low, int high)
{
int pivot = arr[high];
int i = (low-1); // index of smaller element
for (int j=low; j<high; j++)
{
// If current element is smaller than or
// equal to pivot
if (arr[j] <= pivot)
{
i++;
// swap arr[i] and arr[j]
int temp = arr[i];
arr[i] = arr[j];
arr[j] = temp;
}
}
// swap arr[i+1] and arr[high] (or pivot)
int temp = arr[i+1];
arr[i+1] = arr[high];
arr[high] = temp;
return i+1;
}
/* The main function that implements QuickSort()
arr[] --> Array to be sorted,
low --> Starting index,
high --> Ending index */
void sort(int arr[], int low, int high)
{
if (low < high)
{
/* pi is partitioning index, arr[pi] is
now at right place */
int pi = partition(arr, low, high);
// Recursively sort elements before
// partition and after partition
sort(arr, low, pi-1);
sort(arr, pi+1, high);
}
}
}
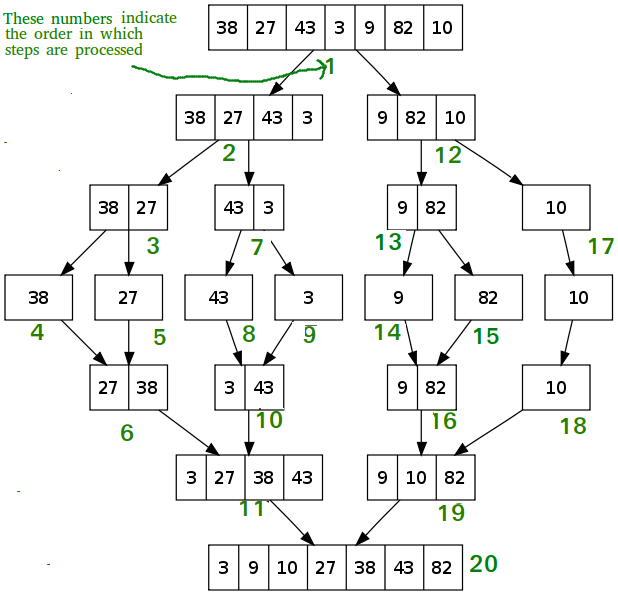
Worst case: O(n^2)
MergeSort(arr[], l, r)
If r > l
1. Find the middle point to divide the array into two halves:
middle m = (l+r)/2
2. Call mergeSort for first half:
Call mergeSort(arr, l, m)
3. Call mergeSort for second half:
Call mergeSort(arr, m+1, r)
4. Merge the two halves sorted in step 2 and 3:
Call merge(arr, l, m, r)
Ex:
/* Java program for Merge Sort */
class MergeSort
{
// Merges two subarrays of arr[].
// First subarray is arr[l..m]
// Second subarray is arr[m+1..r]
void merge(int arr[], int l, int m, int r)
{
// Find sizes of two subarrays to be merged
int n1 = m - l + 1;
int n2 = r - m;
/* Create temp arrays */
int L[] = new int [n1];
int R[] = new int [n2];
/*Copy data to temp arrays*/
for (int i=0; i<n1; ++i)
L[i] = arr[l + i];
for (int j=0; j<n2; ++j)
R[j] = arr[m + 1+ j];
/* Merge the temp arrays */
// Initial indexes of first and second subarrays
int i = 0, j = 0;
// Initial index of merged subarry array
int k = l;
while (i < n1 && j < n2)
{
if (L[i] <= R[j])
{
arr[k] = L[i];
i++;
}
else
{
arr[k] = R[j];
j++;
}
k++;
}
/* Copy remaining elements of L[] if any */
while (i < n1)
{
arr[k] = L[i];
i++;
k++;
}
/* Copy remaining elements of R[] if any */
while (j < n2)
{
arr[k] = R[j];
j++;
k++;
}
}
// Main function that sorts arr[l..r] using
// merge()
void sort(int arr[], int l, int r)
{
if (l < r)
{
// Find the middle point
int m = (l+r)/2;
// Sort first and second halves
sort(arr, l, m);
sort(arr , m+1, r);
// Merge the sorted halves
merge(arr, l, m, r);
}
}
}
What is A* Search Algorithm?
A* Search algorithm is one of the best and popular technique used in path-finding and graph traversals.
Why A* Search Algorithm ?
Informally speaking, A* Search algorithms, unlike other traversal techniques, it has “brains”. What it means is that it is really a smart algorithm which separates it from the other conventional algorithms. This fact is cleared in detail in below sections.
And it is also worth mentioning that many games and web-based maps use this algorithm to find the shortest path very efficiently (approximation).
// A* Search Algorithm
1. Initialize the open list
2. Initialize the closed list
put the starting node on the open
list (you can leave its f at zero)
3. while the open list is not empty
a) find the node with the least f on
the open list, call it "q"
b) pop q off the open list
c) generate q's 8 successors and set their
parents to q
d) for each successor
i) if successor is the goal, stop search
successor.g = q.g + distance between
successor and q
successor.h = distance from goal to
successor (This can be done using many
ways, we will discuss three heuristics-
Manhattan, Diagonal and Euclidean
Heuristics)
successor.f = successor.g + successor.h
ii) if a node with the same position as
successor is in the OPEN list which has a
lower f than successor, skip this successor
iii) if a node with the same position as
successor is in the CLOSED list which has
a lower f than successor, skip this successor
otherwise, add the node to the open list
end (for loop)
e) push q on the closed list
end (while loop)
O(logn) Given a sorted array arr[] of n elements, write a function to search a given element x in arr[]. The idea of binary search is to use the information that the array is sorted and reduce the time complexity to O(Log n)
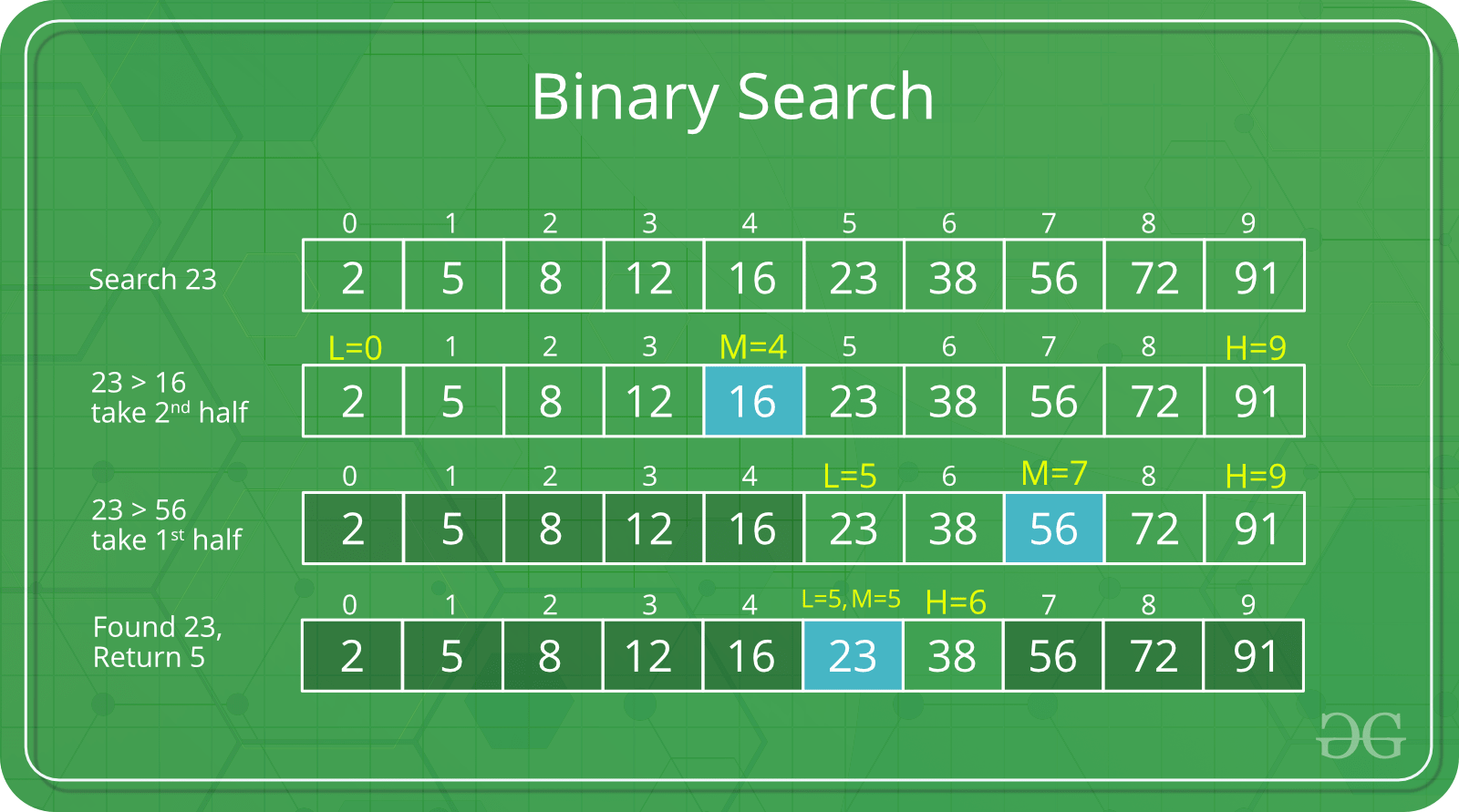
1. Compare x with the middle element.
2. If x matches with middle element, we return the mid index.
3. Else If x is greater than the mid element, then x can only lie in right half subarray after the mid element. So we recur for right half.
4. Else (x is smaller) recur for the left half.
Ex:
int binarySearch(int arr[], int l, int r, int x)
{
if (r >= l) {
int mid = l + (r - l) / 2;
// If the element is present at the
// middle itself
if (arr[mid] == x)
return mid;
// If element is smaller than mid, then
// it can only be present in left subarray
if (arr[mid] > x)
return binarySearch(arr, l, mid - 1, x);
// Else the element can only be present
// in right subarray
return binarySearch(arr, mid + 1, r, x);
}
// We reach here when element is not present
// in array
return -1;
}
List<Double> result = new ArrayList<>();
Queue<TreeNode> nodes = new LinkedList<>();
nodes.add(root);
while(!nodes.isEmpty())
int n = nodes.size();
if(node.left != null) nodes.offer(node.left);
if(node.right != null) nodes.offer(node.right);
Set Node 1 as the start Node
Add this Node to the Queue
Add this Node to the visited set
If this node is our goal node then return true, else add Node 2 and Node 3 to our Queue
Check Node 2 and if it isn’t add both Node 4 and Node 5 to our Queue.
Take the next node from our Queue which should be Node 3 and check that.
If Node 3 isn’t our goal node add Node 6 and Node 7 to our Queue.
Repeat until goal Node is found.
pre-order traversal
Check if the current node is empty / null.
Display the data part of the root (or current node).
Traverse the left subtree by recursively calling the pre-order function.
Traverse the right subtree by recursively calling the pre-order function.
in-order traversal
Check if the current node is empty / null.
Traverse the left subtree by recursively calling the in-order function.
Display the data part of the root (or current node).
Traverse the right subtree by recursively calling the in-order function.
post-order traversal
Check if the current node is empty / null.
Traverse the left subtree by recursively calling the post-order function.
Traverse the right subtree by recursively calling the post-order function.
Display the data part of the root (or current node).